Kernel, il finale dell'avvio
di Alessandro Rubini
In queste pagine (poche :) si descrivono alcuni aspetti della fase
finale dell'avvio del kernel Linux-2.6, quella che avviene in
_init/main.c_
* I sottosistemi del kernel
Un kernel Linux moderno è un oggetto abbastanza complesso. Gran parte
di questa complessità dipende dalla quantità di differenti realtà
che devono convivere nella stessa base di codice: processori diversi,
macchine diverse (anche quando montano lo stesso processore),
protocolli di rete diversificati, bus di comunicazione di vario tipo.
Il codice è stato strutturato ordinatamente in "sottosistemi", ognuno
dei quali offre funzionalità di alto livello alle varie istanze del
codice di più basso livello che deve parlare con le specifiche
periferiche.
Per esempio, il sottosistema USB implementa il protollo di
comunicazione del bus, l'inserimento e la rimozione a caldo delle
periferiche, la gestione delle situazioni di errore; il tutto
associato ad un'interfaccia verso il basso per permettere ai driver
associati al singolo dispositivo USB di integrarsi dinamicamente
nell'architettura software. Inoltre il sottosistema definisce
un'interfaccia di basso livello verso i "controllori" USB, in modo che
l'implementazione del protocollo si possa appoggiare su diverse
implementazioni hardware. Altri sottosistemi del kernel sono SCSI,
IDE, PCI, come pure sottosistemi puramente software, per esempio la
gestione dei dati in ingresso (==drivers/input==).
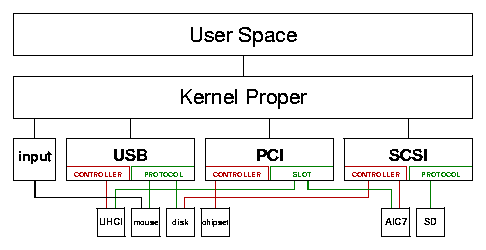
Idealmente, ogni sottosistema ospita una o più classi di moduli di
più basso livello, in una struttura ad albero, in cui le istanze dei
dispositivi, o dei controllori appartengono ad un unico sottosistema,
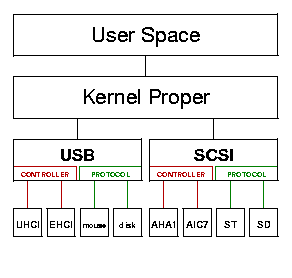
come mostrato in figura 1. In molti casi, però i
driver di livello inferiore devono comunicare con più sottosistemi.
Per esempio i controllori SCSI e USB sono spesso periferiche PCI e un disco
USB viene visto come una periferica SCSI, come rappresentato in
figura 2.
* Il problema dell'inizializzazione
Uno dei problemi da affrontare nel progetto di sistemi variamente
interconnessi come quello descritto è quello dell'avvio. Mentre
l'aggiunta di un modulo a sistema avviato non pone problemi poiché
tutte le componenti del suo ambiente operativo sono già disponibili,
l'avvio del kernel può avvenire solo se i sottosistemi vengano attivati
nell'ordine corretto.
Sempre riferendosi alla figura 2, non è possibile
attivare il disco USB se non sono già stati attivati i sottosistemi
SCSI e USB, il sottosistema PCI per poter comunicare con il controllore USB e
il modulo scsi-disk per il protocollo di comunicazione verso il disco.
Versioni precedenti di Linux usavano un approccio piuttosto
semplicistico per l'inizializzazione,
sicuramente adatto ad un sistema con pochi componenti
ma non più facilmente manutenibile con l'enorme crescita delle
periferiche supportate. Originariamente l'inizializzazione del sistema
consisteva nella chiamata sequenziale delle funzioni di
inizializzazione dei vari moduli, nell'ordine in cui erano inseriti
nel codice sorgente, spesso protetti da serie di ==#ifdef==. Con
l'introduzione di ==<linux/init.h>== si è permesso ad ogni modulo di
dichiarare le sue funzioni di inizializzazione, automatizzando la loro
esecuzione. Purtroppo però il corretto avvio del sistema dipendeva in
ancora in modo oscuro dall'ordine in cui i file apparivano nelle
regole del ==Makefile==; spostare un file o aggiungere un nuovo file
nella posizione sbagliata poteva rendere impossibile il boot, così
come avrebbe potuto essere impossibile compilare il codice attuale con
versioni successive del compilatore.
* Il meccanismo delle ==initcalls==
Per evitare la lunga lista di chiamate alle varie funzioni di
inizializzazione dei vari sottosistemi e driver abilitati nel kernel,
gli sviluppatori sono ricorsi all'uso di sezioni ELF speciali, come
abbiamo già visto fare per la gestione della modularizzazione.
La funzione di inizializzazione di ogni driver, oltre ad essere
inserita nella sezione ==.init.text== (di cui abbiamo già parlato nel
numero di Febbraio), viene dichiarata come ==initcall== in modo che un
suo puntatore venga inserito in una apposita sezione ELF. Durante
l'avvio del sistema, la funzione ==do\_initcalls== (in _init/main.c_)
scorre la lista di tali puntatori per invocare tali funzioni. Una
==initcall== per un ipotetico driver _ipot_ viene scritta nel seguente
modo:
#include <linux/init.h>
int \_\_init ipot\_init(void)
{ /* ... */ }
\_\_initcall(ipot\_init)
Questo meccanismo, disponibile anche nelle ultime versioni di Linux-2.2
è stato introdotto in Linux-2.4 e rimane un uso in Linux-2.6, dove
però è stato esteso permettendo un ordinamento tra le varie funzioni.
Il file ==<linux/init.h>== ora definisce sette diverse classi di
==initcall==:
#define core\_initcall(fn) \_\_define\_initcall("1",fn)
#define postcore\_initcall(fn) \_\_define\_initcall("2",fn)
#define arch\_initcall(fn) \_\_define\_initcall("3",fn)
#define subsys\_initcall(fn) \_\_define\_initcall("4",fn)
#define fs\_initcall(fn) \_\_define\_initcall("5",fn)
#define device\_initcall(fn) \_\_define\_initcall("6",fn)
#define late\_initcall(fn) \_\_define\_initcall("7",fn)
La vecchia dichiarazione ==\_\_initcall== è ancora valida ed è
equivatente a ==device\_initcall==.
Il puntatore ad ogni funzione viene inserito in una sezione ELF
specifica, chiamata, per esempio, ==.initcall6.init== . L'ordinamento
relativo delle varie chiamate viene garantito dal linker script usato
per creare _vmlinux_, cioè _vmlinux.lds.S_ per ciascuna piattaforma,
che prescrive la creazione di un'unica sezione ==.initcall.init==
che contenga, in ordine numerico, le sette sezioni presenti nei
file oggetto di ingresso al linker:
\_\_initcall\_start = .;
.initcall.init : {
*(.initcall1.init)
*(.initcall2.init)
*(.initcall3.init)
*(.initcall4.init)
*(.initcall5.init)
*(.initcall6.init)
*(.initcall7.init)
}
\_\_initcall\_end = .;
I due simboli ==\_\_initcall\_start== e ==\_\_initcall\_end==
identificano gli estremi della sezione nel file _vmlinux_ e vengono
usati per accedere al vettore di puntatori in ==do\_initcalls==.
Lo stesso meccanismo di ==initcall== può venire usato per gestire
ordinatamente l'interpretazione degli argomenti sulla linea di comando
del kernel. La dichiarazione ==\_\_setup==, mostrata nel
riquadro 1 insieme ad una versione semplificata del codice di
==do\_initcalls==, inserisce informazioni in una sezione ELF chiamata
==.init.setup==.
* I parametri del kernel
L'interpretazione degli argomenti sulla linea di comando del kernel
appena introdotta è un'altra funzionalità molto importante per un
corretto avvio del sistema.
Nonostante _init/main.c_ usi ==\_\_setup== per dichiarare alcuni
parametri, come ==quiet== e ==debug== di cui si è parlato il mese
scorso, si tratta del meccanismo di Linux-2.4, oggi considerato
obsoleto, a favore di quello definito in ==<linux/moduleparm.h>==.
Il nuovo meccanismo è più pesante del precedente a livello di
implementazione, ma più leggero da usare. Inoltre permette di
unificare, a livello di codice sorgente, il passaggio di un parametro
ad un modulo caricato dinamicamente, il passaggio dello stesso
parametro al driver staticamente incluso nell'immagine del kernel
e la modifica del parametro durante il funzionamento del sistema
(ma questa funzionalità non è ancora disponibile).
Per il programmatore, la dichiarazione di un parametro configurabile
si riduce ad una riga di codice. Il kernel contiene già al suo
interno il supporto per la lettura e scrittura dei tipi fondamentali
e delle stringhe (usando il nome ==charp== come tipo),
oltre a vettori di tipi fondamentali e stringhe.
Per esempio, se l'ipotetico modulo _ipot_ avesse un parametro stringa
e uno intero leggibile da tutti e modificabile a run-time dal solo
amministatore di sistema conterrebbe le seguenti righe:
char *ipot\_name;
module\_param(ipot\_name, charp, 0);
int ipot\_param;
module\_param(ipot\_param, int, S\_IRUGO|S\_IWUSR);
Il terzo argomento di _module\_param_ rappresenta i permessi di
accesso per un file che esporti il parametro allo spazio utente
in formato ASCII; passando il valore 0 si richiede di non creare
alcun file.
Trascurando il caso dei vettori, che si differenzia leggermente, la nuova
implementazione si basa su ==struct kernel\_param==, una struttura dati
che contiene oltre al nome, al puntatore al parametro e ai permessi di
accesso, anche i puntatori a due funzioni usate per converire il
parametro dalla sua forma testuale a quella interna e viceversa.
Le conversioni sono definite in _kernel/params.c_;
il scondo argomento passato a _module\_param_ permette di identificare
la coppia di funzioni da inserire nella struttura dati.
Le strutture ==kernel\_param== vengono raccolte
in una sezione ELF apposita, chiamata ==\_\_param== e recuperate
al boot tramite due simboli definiti nel linker script, come
già visto per ==initcalls==.
Poiché i parametri dinamici devono essere assegnati prima
dell'inizializzazione di un sottosistema o di un driver, la funzione
_parse\_args_ ( definita in _kernel/params.c_) viene chiamata nella
parte iniziale di _start\_kernel_. Quando _parse_args_ trova
un parametro che non e` definito nel vettore di strutture dati, utilizza un
puntatore ==unknown== come soluzione di ripiego. Tale
soluzione, chiamata ==\_\_unknown\_bootoption== e definita in _init/main.c_,
cerca il parametro nella sezione ==.init.setup==, in modo da continuare a
supportare il meccanismo di dichiarazione dei parametri di Linux-2.4; i
parametri che non vengono riconosciuti nemmeno in questo modo
diventano variabili di ambiente
o opzioni sulla riga di comando del processo init, come è sempre
stato per gli argomenti di linea di comando non riconosciuti dal kernel.
* I parametri di linea di comando modificabili a run-time.
Se un parametro dichiarato con ==module\_param== deve essere leggibile
o scrivibile durante la vita della macchina, il sistema lo dovrebbe
rendere accessibile tramite un file all'interno di ==sysfs==, un
filesystem virtuale, come _/proc_, che normalmente viene montato sulla
directory _/sys_, ma le versioni attuali di Linux-2.6 non rendono visibili
i parametri in ==sysfs==.
L'implementazione di questa funzionalità dovrà in ogni caso
richiedere una seconda iterazione sulla sezione ==__param== in un
momento più avanzato dell'inizializzazione del kernel, dopo la
creazione della struttura di ==sysfs== che avviene nella
funzione ==driver\_init==, chiamata verso la fine della procedura
di avvio. Sarà anche necessario associare i parametri allo
specifico oggetto cui appartengono, associazione che non è
realizzata dalla struttura ==kernel\_param== come definita ora.
==sysfs== e la definizione di parametri modificabili a run-time
(parametri diversi da quelli che appaiono nella linea di comando
del kernel) saranno l'argomento del prossimo articolo sul kernel.
<Figura 1 - La struttura ideale ad albero>
<Figura 2 - La struttura reale dei sottosistemi -- fig2.ps>
<Riquadro 1 - do_initcalls e __setup>
static int __init initcall_debug_setup(char *str)
{
initcall_debug = 1;
return 1;
}
__setup("initcall_debug", initcall_debug_setup);
static void __init do_initcalls(void)
{
initcall_t *call;
for (call = &__initcall_start;
call < &__initcall_end;
call++) {
if (initcall_debug)
printk("calling initcall 0x%p\n", *call);
(*call)();
}
/* Make sure there is no pending stuff */
flush_scheduled_work();
}